Path Planning
Published:

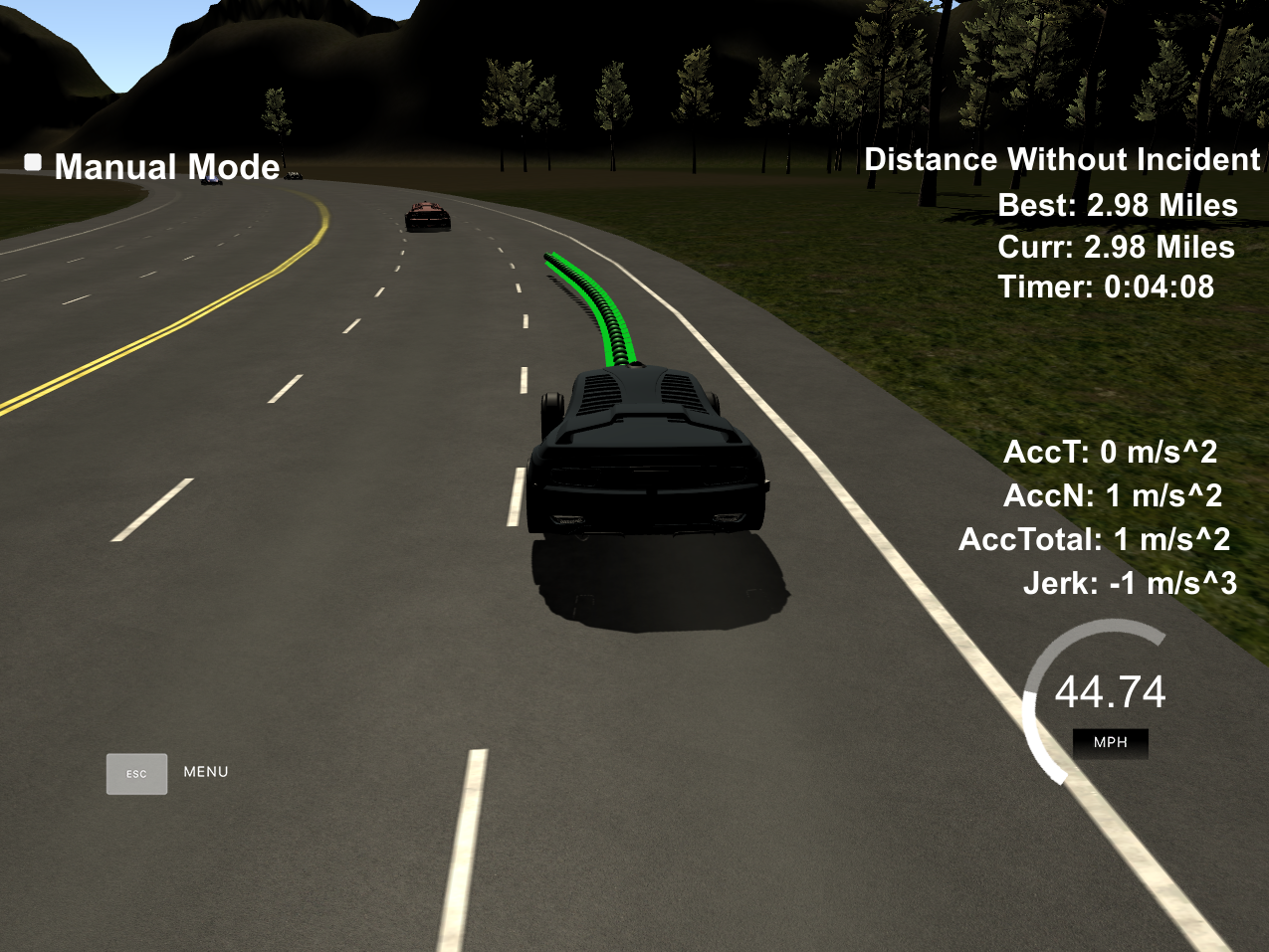
The objective of this project is to develop a model that, given a comprehensively parsed set of sensor data, it is capable of driving a car through a populated 3-lane highway without breaking traffic regulation (ie speed limit) nor causing any major discomfort to its occupants (ie no large acceleration or jerk).