Lane Finding for a Self-Driving Car
Published:

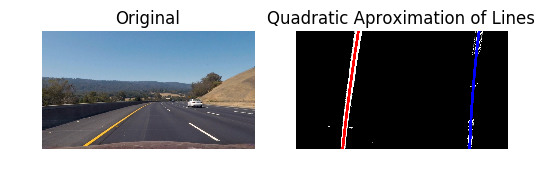
Built an advanced lane-finding algorithm using distortion correction, image rectification, colour transforms, and gradient thresholding. Identified lane curvature and vehicle displacement. Overcame environmental challenges such as shadows and pavement changes.